課題については2017a/Mission3を参照。今回は缶を積み上げるロボットを作成する。
片方のロボットでライントレースをしながら3缶運び、ゴールに近づいたらもう片方と通信を開始し、缶を積み上げる。
&ref 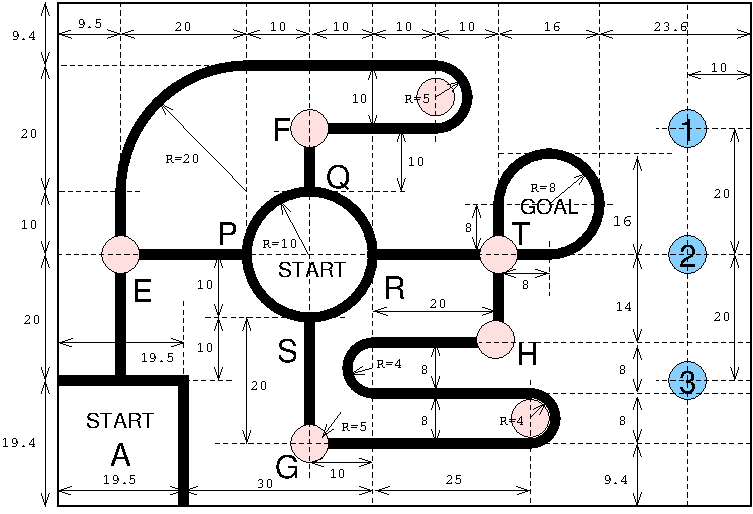
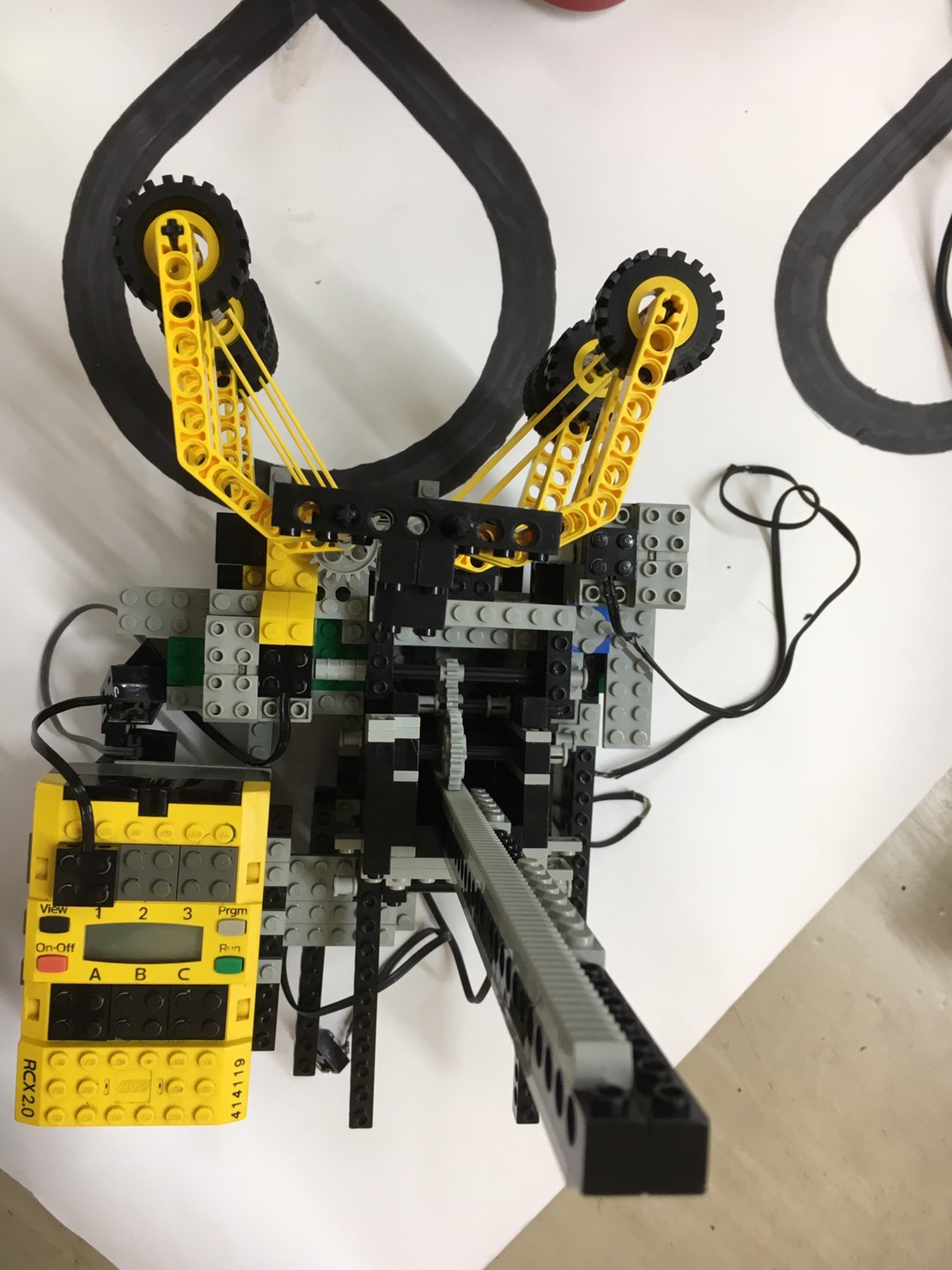
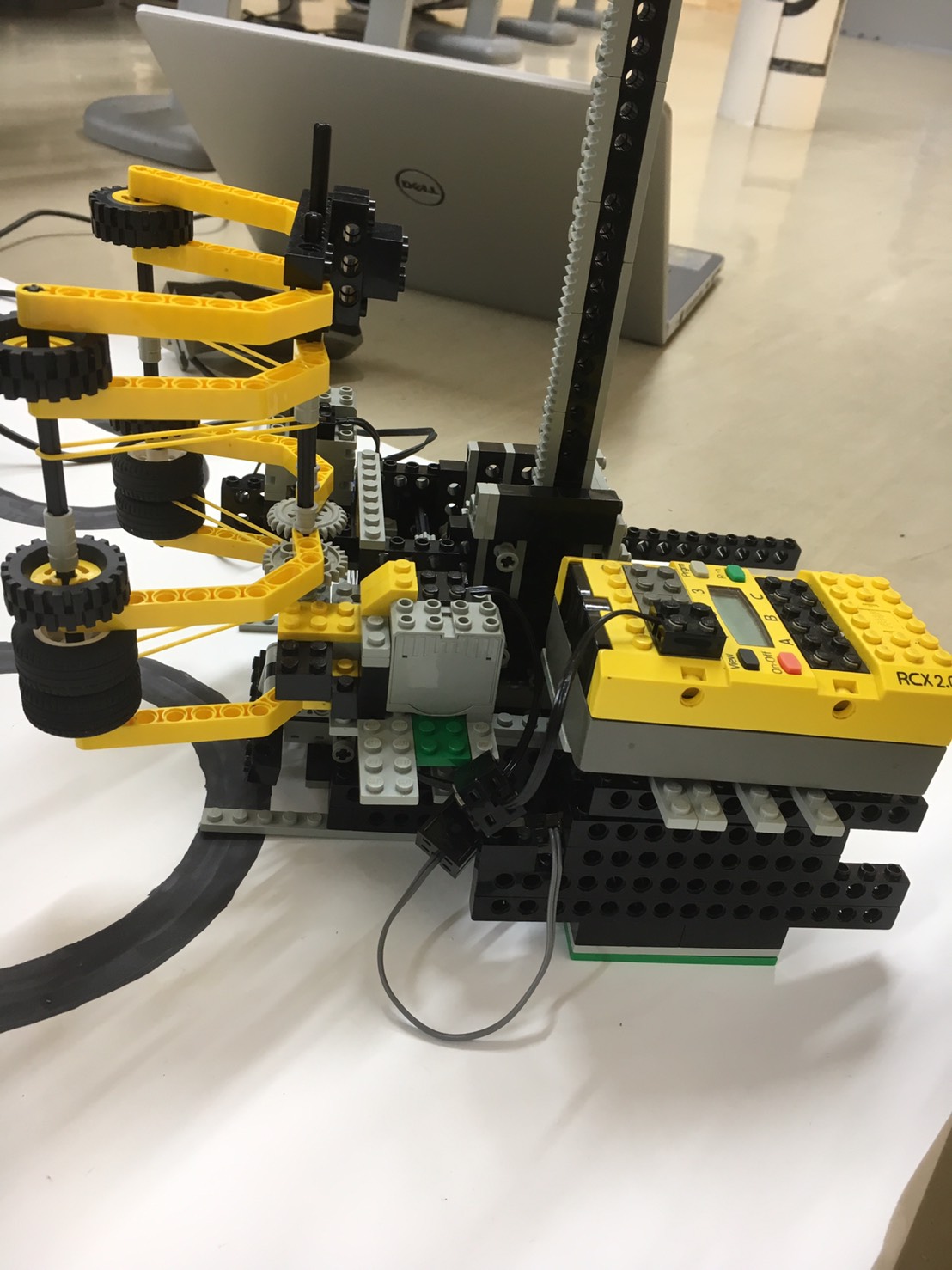
http://yakushi.shinshu-u.ac.jp/robotics/?plugin=attach&pcmd=open&file=%A5%ED%A5%DC%A5%B3%A5%F3%A3%B2.jpg&refer=2017a%2FMember%2Fdai%2FMission3 ロボット上 http://yakushi.shinshu-u.ac.jp/robotics/?plugin=attach&pcmd=open&file=%A3%B3%A5%ED%A5%DC%A5%B3%A5%F3.jpg&refer=2017a%2FMember%2Fdai%2FMission3 ロボット横 http://yakushi.shinshu-u.ac.jp/robotics/?plugin=attach&pcmd=open&file=%A3%B4%A5%ED%A5%DC%A5%B3%A5%F3.jpg&refer=2017a%2FMember%2Fdai%2FMission3 アーム http://yakushi.shinshu-u.ac.jp/robotics/?plugin=attach&pcmd=open&file=%A5%ED%A5%DC%A5%B3%A5%F3%A3%B3.jpg&refer=2017a%2FMember%2Fdai%2FMission3 アームの上下機構
画像が多くなったのでリンクを貼りました。 一番下の写真のとおり、歯車を四つ噛み合わせることでモーターの動力を伝えやすくした。 アームの缶を挟む動作も歯車を3つ噛み合わせるて缶を挟む力を強くしている。 2つめの写真の通り、本来はタイヤをつけてロボットを前後させて缶を積み上げる予定だったが、本番までに間に合わずルール違反となりました。
プログラムについてはnideのホームページを参照。nideありがとう。
期末テストさえなければ、もっとうまくいったに違いないです。でもこうやって短い時間の中でチームで協力してここまでできたのは良かったです。ロボティクス入門の課題はきついものでしたが、しんどいことばかりではなく、楽しいことや普段のくだらない必修科目の授業なんかでは味わうことのできない達成感を得ることができて本当に良かったです。チームの皆さん本当にお疲れ様でした。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}