目次
課題1については2019a/Mission1を参照
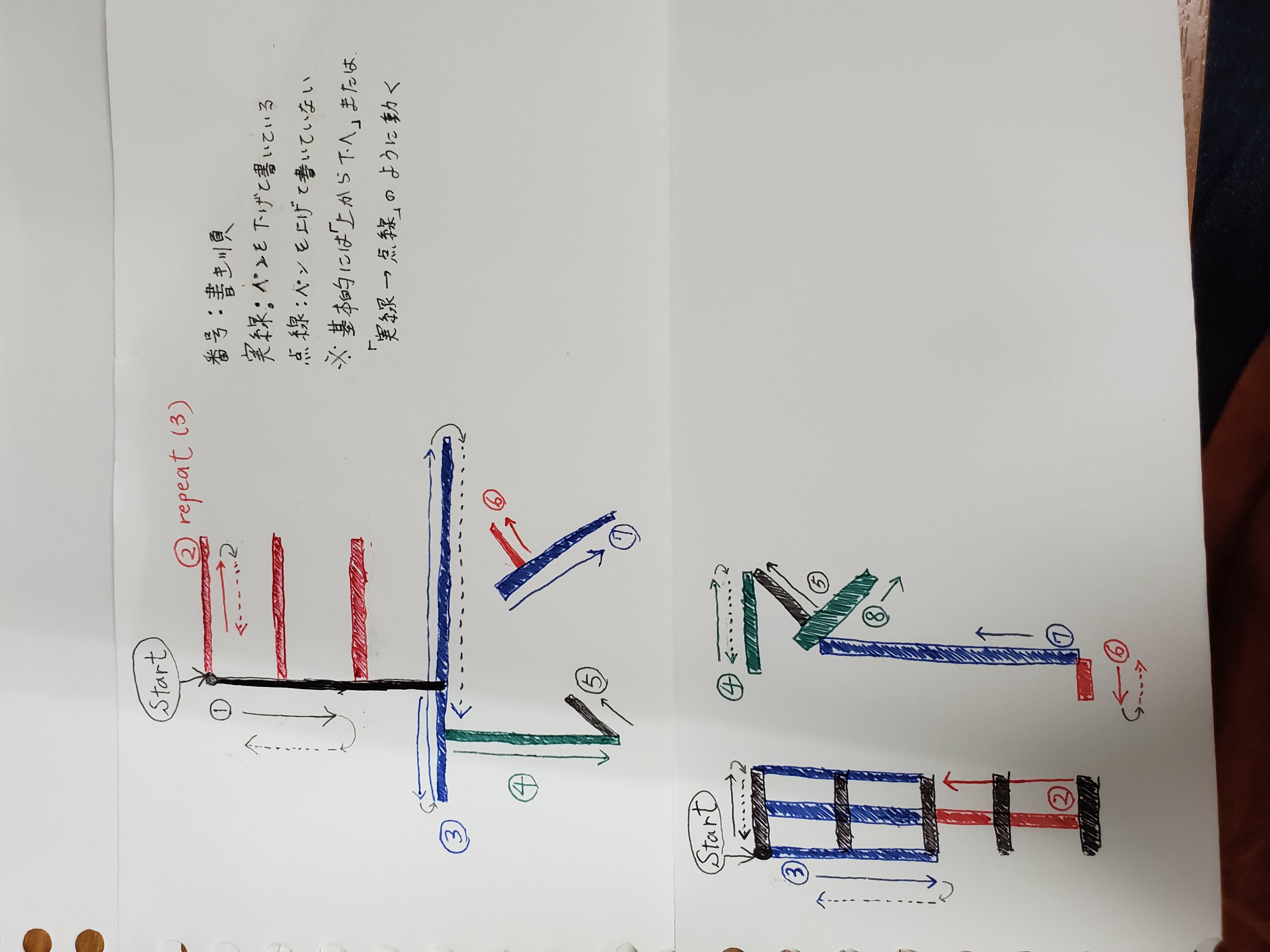
「長野」と書くことにした。
下記を参照
下の車が縦に動き、上に乗っている車が横に動くようになっている。上の車にペンを上げ下げするアームを取り付けた。下の車にレールを取り付け、その上をもう一台の車が動くようにすることで、前後左右に線を描けるようにした。また、下の車はタイヤを五個取り付けることでレールの安定性を高めた。




下の車は前後に動き、上に乗っている車は左右に動く。また、上に乗っている車に上げ下げができるペンを取り付けたことで、縦・横・斜めに線を引くことを可能にした。さらに、上に乗っている車にはペンの重さによる転倒を防ぐために、おもりを取り付けた。
#define stp OnFwd(OUT_A,10);Wait(200);Off(OUT_A)//ペンを下げる動作 #define revp(s) OnRev(OUT_A,20);Wait(s);Off(OUT_A)//ペンを上げる動作 #define stmain(s) OnFwd(OUT_C,20);Wait(s);Off(OUT_C)//一番下の車の前進 #define revmain(s) OnRev(OUT_C,20);Wait(s);Off(OUT_C)//一番下の車の後退 #define stsub(s) OnFwd(OUT_B,20);Wait(s);Off(OUT_B)//上に乗ってる車の前進 #define revsub(s) OnRev(OUT_B,20);Wait(s);Off(OUT_B)//上に乗ってる車の後退 #define vertical(s) stp;stmain(s);revp(s);revmain(s);//線を縦に書く動作 #define horizen(s) stp;stsub(s);revp(s);revsub(s);//線を横に書く動作 #define diagonal(s) OnFwd(OUT_B,20);OnRev(OUT_C,20);Wait(s);Off(OUT_BC);//線を右上に書く動作 #define oblique(s) OnFwd(OUT_B,20);OnFwd(OUT_C,20);Wait(s);Off(OUT_BC);//線を右下に書く動作
task main()
{
vertical(400);
repeat(3){
horizen(500);
stmain(150);
}
stp;
revsub(300);
stsub(1000);
revp(250);
revsub(800);
stp;
OnFwd(400);
diagonal(200);
revp(250);
diagonal(200);
stp;
diagonal(200);
revp(250);
revsub(200);
stp;
oblique(350);
revp(250);
stmain(400);
revsub(400);
repeat(5){
horizen(350);
stmain(120);
}
stsub(175);
revmain(120);
stp;
revmain(240);
revp(250);
revsub(175);
revmain(300);
repeat(3){
vertical(300);
stsub(175);
}
horizen(300);
stsub(175);
stmain(150);
stp;
diagonal(200);
revp(250);
stmain(500);
revsub(150);
stp;
revsub(100);
revp(250);
stsub(100);
stp;
revmain(350);
oblique(100);
}
車の上に車を乗せるという斬新な発想ではあったが、思ったよりうまくできた。少ないパーツでコンパクトに仕上がったと感じた。
上に乗っている車が不安定だったので、そこを改良できればよかったと思う。また、ペンを取り付けたアームがガタガタしていたが、そこの改善策を思いつけなかった。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}